强化学习报告
项目进展报告

集成组
表格的增加功能的实现
下架管理
出库管理
修改图标
样式一修改会出现很多bug还没改出来
实现仓储系统 储位管理部分 添加货架时 自动为每个添加的货架安排空着的货架位置信息。
驾驶组
辛文均:熟悉ROS、语音功能包以及Turtlebot机器人的使用。
王立远:调研强化学习在Turtlebot探索的应用。
容晋雄:人脸模块中询问陌生人姓名,从回答中提取姓名;学习了解ASP语言,做ASP学习的一个PPT进行语法讲解(可以穿插找例程代码)。
刘晓龙:demo编写,基于状态机;
王辉:了解百度语音包功能及其实现,注册新的账户,使语音转文本功能包一个账号,唤醒词功能包识别为一个账号。研究turtlebot跟随算法,进行优化,解决机器人在跟随过程中速度过快容易丢失的问题。
黄文龙:了解百度语音包功能及其实现,注册新的账户,使语音转文本功能包一个账号,唤醒词功能包识别为一个账号;学习了解ASP语言。
孔健:完善物体识别模块,主要语言组织方面,返回语音内容的组织。
周长辉:人脸模块中询问陌生人姓名,从回答中提取姓名。
仓储组
窦家锐:
- 熟悉各个传感器,寻找有用的传感器。
- 基于位置、马达、线性传感器,多次重写控制器,对机器人进行命令式运动控制,效果并不好,必须还要是用GPS提供的信息,针对每个定点调整自己的位姿,我打算用Carmar
提供的数据,相对坐标矫正。另外,相机应该是没有识别二维码的功能,除了GPS到目前为止没有发现任何一个能测当前速度的传感器。
- 仿真世界最大的问题就是移动不精准,命令时控制不连续,控制器的编写还要不断完善。
- 机器人的机械结构可能存在影响运动的问题。
王彭:
- 学习完 webots 的基础教程,已基本了解 webots 从仿真世界建模到编
- 写机器人控制器的流程,并能完成一个简单的仿真。
张琪本周任务是看了一下代码内容:
- 给输入输出站的机器人分配一个合理的存储任务的函数DoStoreTaskForStation,
- 给机器人确定最佳站台(以输入站为例)和最佳货架的函数 GenerateScorerIStationForBotWithPod和GenerateScorerPodForIStationBot
- 选取最佳方案时,使用了一个打分函数Score
谢新凯:
1、对优化任务池大小的Q-learning算法又跑了几次,发现结果任务池的大小并没有收敛。
2、下一步准备改变动作幅度(因为发现任务池大小变化太慢了,只能一个一个的变化),或者改一下回报函数。
- 机器人自身的比例、性能指标接近于Geek+机器人的指标
- 差分驱动轮
- 机器人机械结构
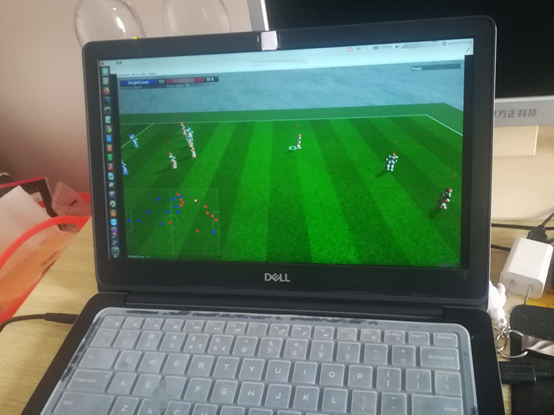
3D组
1.在上周的基础上又增加了训练的任务。运行了460代并测试。对时间的提升不高。
通信部分,看了Parser 里面的函数,特别是要其以9识和Barx知Sgt部分,分别处理看到物体的分析和未看到物体通过队友的sighting来分析位置。e如果要获取准确的位置,应该要对l期知部分中进行修改。
2.行走引擎方面
学习总结了memory文件夹里的模块,学习了3D中对关节角度赋值的部分。总结了关于3D中行走的多个模块。要对3D中不同的部分进行修改。
3.谢新凯:
针对南邮的论文进行了调研,主要是针对动作空间的筛选。了解了阵型和角色分配的部分代码。
对阵型的每一个位置进行全排列,找出其中总的代价最小的动作集,再使用动态编程找到最优的一组、之后利用8算法进行优化。
但基于我们原先KM算法的角色分配下,并不能优化多少。因为要固定初始位置.不然的话S的值太多了,不能用于实战中的角色分配,所以并不能优化多少。再进行强化学习的优化意义不大。
4.踢球优化的缺踢部分(王彭):
看了fitmess_fumctions.py 和sample_start-optimization.sh.了解脚本流程和作用。
尝试优化快踢的一种类型,下周修改脚本对参数进行测试。
下一周要统计未优化好的类型,制定一个优化的计划。按照计划执行。
5.于淑瑾:
看了UT的深度学习传球.将考虑使用这个深度学习来改进我们的传球策略。为了解决国赛中的限制.研究一种基于深度学习的方法。我们通过培训价值网络来确定潜在通过地点的价值。当我们评估我们网络的性能时我们使用一个监督的学习问题公式来训练我们的网络。
抓取组
Nao导览项目
- 高尔夫功能的实现,已测试通过,可看视频。
机器人会有四次调整位置: 第一次,机器人转到正对球的方向
第二次,机器人走到距离球20厘米的位置
第三次,机器人再次对准球,进行修正
第四次,机器人走到离球10厘米的位置
- Kaldi本地语音识别在电脑上已经配好环境整理了一份技术报告,跑出来测试的音频来了,但也是比较慢,效果也不是很好,下周试试自己的测试音频,如果还不如原来的理想,就还是用原来的。
- 机器人按键部分的功能已经全部实现,下周会进行测试。